The robot needed to be real scale and remote controlled to move it the way it looks in the movie. I was in charge of all related with the hardware design, including mechanisms and considering the inclusion of electronic parts such as sensors, speakers, lights, batteries and micro-controllers. The dimensions about 47″ high and 20″ diameter were taken from the official web of R2D2 builders Astromech, as well as all the drawings with which I was able to design 3D models of many parts using Rhinoceros , and then print them using the 3D printer Makerbot .
The rest of the materials were mainly recycled from scratch, some parts were made by hand and others using a laser cutter.
The robot moves with a motor in each one of the rear feet, which are controlled with a smartphone app.
Communication is possible through wifi using a Raspberry Pi . The phone application allows you to control the movements and also produce sounds. The LED’s and motors that control the movement of the eye of the robot are controlled by an Arduino.
This project was commissioned to YesYesNo for a Star Wars themed wedding.
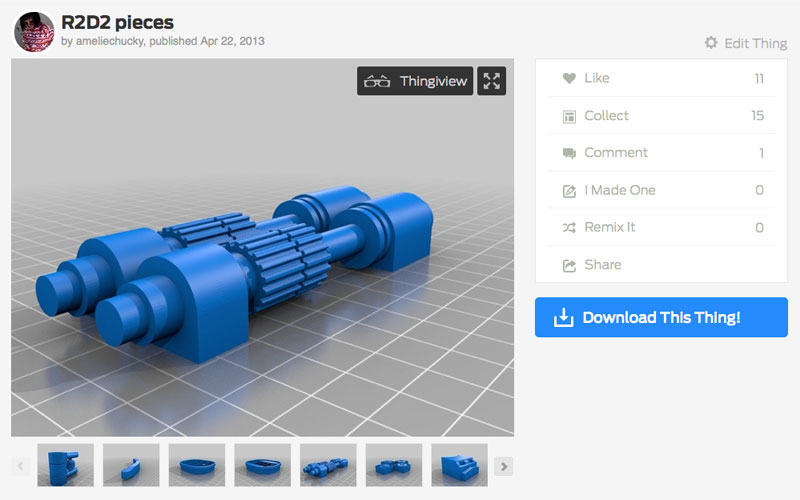
All the 3D files are free to download on Thingiverse web site.